Advanced Engineering Dynamics 2010 Part 2 doc

Advanced Engineering Dynamics 2010 Part 2 doc
...
to
m,x,
+
k,x1
-
k2(x2
-
XI)
+
c,X,
-
~2( X2
-
XI)
=
F,
and for
x,
mg2
+
k2(x2
-
xI)
+
c2(X2
-
X,)
=
F2
Fig.
2. 2
Energv
for
a
group
of
particles
17
1.14
Conservation ... the system shown in Fig. 2. 2 the scalar functions are
k,
2
k2
Y
=
-XI
+
-(x2
-
XJ2
2 2
Ci
-2
C2
2 2
3
=
-XI
+
-(X2
-
X,f
The virtual work done by the ext...

Advanced Engineering Dynamics 2010 Part 6 docx
...
Thus
e.1.e
=
l2d
+
m2z2
+
n2z3
=
(1
-
n2)1,
+
n2z3
Finally equation
(5.59)
is
Gm G
[3(1
-
n2>1,
+
3n24
-
2~ ,
-
z,]
p= +-
R 2~ 3
R 2~ 3
G
(3n2
-
I)(z,
-
1,) ...
Let
r
=
tan(W2)
so
that
2r
1
+
T2
sin0
=
and
Substituting into equation
5.48
gives
J(1
-
e32r
(1
+
r*)
+
e(l
-
r2)
sin0
=
2 tan(0 /2)
1
+
tan2(0 /2)
sin0
=
C...

Advanced Engineering Dynamics 2010 Part 8 docx
... below
V
[
-
!!
(4
+
2e-”)
z
+
2
(f
rz2
+
B2
]
L
f2
=
-
C
where
and
(2
-
4p)
+
3 12
f3
=
-
e-’LL’L
-
-
2p
[
-4p+
c
[Le
(6.81)
(6. 82)
where
B,
=
e-6p
+ ...
or
c2
=
Elp
as
before.
Fig.
6. 12
148
Impact and one-dimensional wave propagation
Fig.
6 .21
Fig.
6 .22
Maximum strain at
x
=
L
for
various period numbers,
n
1
2
1...
Advanced Engineering Dynamics 2010 Part 13 docx
...
=
y2m[y2(a)T(u)u,/c2
+
a,]
F,
=
y2m[y2(a)T(u)uy/c
2 +
4
=
y2rn[y2(alT(u)u,/c2
+
aZ]
(9.1
12)
(9.1
13)
(9.1 14)
(9.115)
(9.1
16)
(9.1
17)
(9.118)
The Doppler effect
24 5 ...
YXI
>
lx
-
.VI
(1
-
yx)’
>
(x
-
y )2
1
+
y2x2
-
2yx
>
x2
+
y2
-
2yx
(1
-
x’)
>
y2(1
-
x2)
1
>y2
or
Finally
which satisfies our conditions. Beca...

Advanced Engineering Dynamics 2010 Part 1 pdf
...
63
1 72
1 72
1 72
176
177
178
179
184
186
189
1 92
194
194
194
197
22 3
23 5
23 5
23 5
24 0
24
1
24 2
24 6
24 9
25 0
25 2
25 4
25 6
25 8
26 1
27 2
28 1
28 8
Bibliography
29 7
Index ... particles
The principle of virtual work
D’Alembert’s principle
2
Lagrange’s Equations
2. 1
2. 2
2. 3
2. 4
2. 5
2. 6
2. 7
2. 8
2. 9
2. 10
2. 1
1
Introd...

Advanced Engineering Dynamics 2010 Part 3 ppt
...
The kinetic energy is given by
m
.2
m
-2
I
.2
I
.2
2
2
2
2
The virtual work done by the impact force at A is
T
=
-XI
+
-x2
+
-e,
+
-e2
6W
=
F(-dr,
+
ado,)
and the ...
-
o,o,z]
+
2m(w,i
-
or$)
-efv
=
m[(q
+
o,)y
-
o,.o,z
-
o,o,x]
+
2m(o$
-
oj)
or
Similarly
2
2
2
2 2
-efz
=
m[(o,
+
O,)Z
-
O,O,X
-
O,O,,y]
+
2m(ox9...

Advanced Engineering Dynamics 2010 Part 4 pot
...
f
=
21 ,xi
+
2Z2yj
+
21 ,zk
Now
x=lp=-
ZO
=
-
Ox
gradf
=
-
2L
\
(2T)
\
(2T)
etc.,
so
\
(2T)
Kinetics
of
a
rigid body
59
(4.5)
(4-6)
ds
=
del
X
a
+
de2
X
(a ... rotation is about the
z
axis equation
(4.43)
reduces to
1
2
T
=
-
~rn,(a~xj
-
w,yi )2
1
2
=
-
a2Cmi(x2
+
y2)
12
=-a
I,
2
(4.47)
(4.48)
Since the choice
of
axis...

Advanced Engineering Dynamics 2010 Part 5 pdf
...
_-
P
m, m2
2
2
IF,^^
=
m,w
r,
-
mI?,
=
m2m
r,
-
m2r2
and taking moments about the centre of
mass
(C
of
M)
gives
0
=
m,(r,&
+
2wi,)
=
m2(r2&
+
2wi2)
or
(5.15) ...
P,cos~ )2
P:
E
=
-
Z,e2
+
+
-
+
mgh
cos8
(4.89)
2 21, sin2
0
21 3
Equation
(4.89)
can be rearranged in the following form
1
2
E’
=
-
z,e2
+
v
(e)
where the c...

Advanced Engineering Dynamics 2010 Part 9 potx
...
dx
-
0)
=
-V2
2
(6. 122 )
(6. 123 )
(6. 124 )
(6. 125 )
It is now possible to eliminate
0
between equations (6. 120 ) and (6. 12 1). Equation (6. 120 )
can be written
as
2
2
V.lf
-
KC, ...
+
dzk
1 62
Impact
and one-dimensional wave propagation
we get
2
2
COS
(k)
-
2
=
-
-
mw
S
or
2
2( -2 sin2 (W2))
=
-
=
S
giving
o
=
21
(s/m)
sin(W2)...
Advanced Engineering Dynamics 2010 Part 11 pps
... terms of their components
Pzr
=
Plr
+
4
P2,
=
PI,
+
4
P 22
=
PI;
4-
u:
or
(Pz)
=
(PI)
+
(4
(8 .22 )
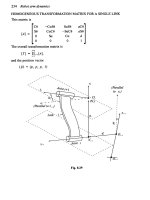
Kinematics
of
a robot arm
2
13
Fig.
8.19
ce,
o
se,
a,ce,
3[A]4 ...
O)T,
a null vector), we may now combine equations
(8 .23 )
and
(8 .24 )
to
give
(8 .25 )
or, in abbreviated form,
(P2)
=
[Tl(dl)
(8 .26 )
Here
(3)
is the
4
X
1
homogeneous...
Từ khóa:
- thiết kế bài giảng lịch sử 8 tập 1 part 2 docx
- tài liệu check your english vocabulary for travel part 2 doc
- tự học excel 2010 part 2
- history of western philosophy documentary part 2 of 3
- learning autocad 2010 volume 2 engineering surveyor
- youtube doctor who the end of time part 2
- Báo cáo quy trình mua hàng CT CP Công Nghệ NPV
- Nghiên cứu tổ chức chạy tàu hàng cố định theo thời gian trên đường sắt việt nam
- Giáo án Sinh học 11 bài 13: Thực hành phát hiện diệp lục và carôtenôit
- Giáo án Sinh học 11 bài 13: Thực hành phát hiện diệp lục và carôtenôit
- Giáo án Sinh học 11 bài 13: Thực hành phát hiện diệp lục và carôtenôit
- Giáo án Sinh học 11 bài 13: Thực hành phát hiện diệp lục và carôtenôit
- ĐỒ ÁN NGHIÊN CỨU CÔNG NGHỆ KẾT NỐI VÔ TUYẾN CỰ LY XA, CÔNG SUẤT THẤP LPWAN
- ĐỒ ÁN NGHIÊN CỨU CÔNG NGHỆ KẾT NỐI VÔ TUYẾN CỰ LY XA, CÔNG SUẤT THẤP LPWAN
- Quản lý hoạt động học tập của học sinh theo hướng phát triển kỹ năng học tập hợp tác tại các trường phổ thông dân tộc bán trú huyện ba chẽ, tỉnh quảng ninh
- Phát triển mạng lưới kinh doanh nước sạch tại công ty TNHH một thành viên kinh doanh nước sạch quảng ninh
- Phát triển du lịch bền vững trên cơ sở bảo vệ môi trường tự nhiên vịnh hạ long
- Nghiên cứu, xây dựng phần mềm smartscan và ứng dụng trong bảo vệ mạng máy tính chuyên dùng
- Nghiên cứu về mô hình thống kê học sâu và ứng dụng trong nhận dạng chữ viết tay hạn chế
- Nghiên cứu tổng hợp các oxit hỗn hợp kích thƣớc nanomet ce 0 75 zr0 25o2 , ce 0 5 zr0 5o2 và khảo sát hoạt tính quang xúc tác của chúng
- Nghiên cứu khả năng đo năng lượng điện bằng hệ thu thập dữ liệu 16 kênh DEWE 5000
- Thơ nôm tứ tuyệt trào phúng hồ xuân hương
- Thiết kế và chế tạo mô hình biến tần (inverter) cho máy điều hòa không khí
- Chuong 2 nhận dạng rui ro
- BT Tieng anh 6 UNIT 2
- Tăng trưởng tín dụng hộ sản xuất nông nghiệp tại Ngân hàng Nông nghiệp và Phát triển nông thôn Việt Nam chi nhánh tỉnh Bắc Giang (Luận văn thạc sĩ)