Bài giảng lý thuyết điều khiển tự động - Mô hình toán học, hệ thống điều khiển liên tục part 7 pot

Bài giảng lý thuyết điều khiển tự động - Mô hình toán học, hệ thống điều khiển liên tục part 1 doc
... phân
=++++
−
−
−
)(
)()()(
1
1
1
10
tca
dt
tdc
a
dt
tcd
a
dt
tcd
a
nn
n
n
n
n
L
)(
)()()(
1
1
1
10
trb
d
t
tdr
b
d
t
trd
b
d
t
trd
b
mm
m
m
m
m
++++
−
−
−
L
26 September 2006 © H. T. Hồng - ÐHBK TPHCM 1
LÝ THUYẾT ĐIỀU KHIỂN TỰ ĐỘNG
LÝ THUYẾT ĐIỀU KHIỂN TỰ ĐỘNG
Giảng viên: TS. Huỳnh Thái Hoàng
Bộ môn Điều Khiển Tự Động
Khoa Điện – Điện Tử
Đại học ... 4
Khái niệm về mô hình t...

Bài giảng lý thuyết điều khiển tự động - Mô hình toán học, hệ thống điều khiển liên tục part 2 pdf
... ở phụ lục sách Lý thuyết Điều khiển tự động.
<
≥
==
0 t 0
0 t sin
)().(sin)(
nếu
nếut
tuttf
ω
ω
f(t)
t
0
{}
22
)()(sin
ω
ω
ω
+
=
s
tutL
26 September 2006 © H. T. Hồng - ÐHBK TPHCM 20
Hàm ... H. T. Hồng - ÐHBK TPHCM 17
Hàm truyền của hệ thống:
Định nghóa: Hàm truyền của hệ thống là tỉ số giữa biến đổi
Laplace của tín hiệu ra và biến đổi Laplace của tí...

Bài giảng lý thuyết điều khiển tự động - Mô hình toán học, hệ thống điều khiển liên tục part 3 pps
... điện từ của động cơ
hằng số thời gian điện cơ của động cơ
26 September 2006 © H. T. Hồng - ÐHBK TPHCM 22
Hàm truyền của các bộ điều khiển (khâu hiệu chỉnh)
Hàm truyền của các bộ điều khiển (khâu ... truyền:
BMssF
sV
sG
+
==
1
)(
)(
)(
⇔
1
)(
+
=
Ts
K
sG
với
B
K
1
=
B
M
T =
26 September 2006 © H. T. Hồng - ÐHBK TPHCM 21
Hàm truyền của các bộ điều khiển (khâu hiệu chỉn...

Bài giảng lý thuyết điều khiển tự động - Mô hình toán học, hệ thống điều khiển liên tục part 4 docx
... truyền của hệ thống tự động
Hàm truyền của hệ thống tự động
26 September 2006 © H. T. Hồng - ÐHBK TPHCM 34
Đại số sơ đồ khối
Đại số sơ đồ khối
Sơ đồ khối của một hệ thống là hình vẽ mô tả chức ... tổng
26 September 2006 © H. T. Hồng - ÐHBK TPHCM 37
Đại số sơ đồ khối
Đại số sơ đồ khối
Hàm truyền của các hệ thống đơn giản (tt)
Hệ thống hồi tiếp âm ...

Bài giảng lý thuyết điều khiển tự động - Mô hình toán học, hệ thống điều khiển liên tục part 5 potx
... H. T. Hồng - ÐHBK TPHCM 44
Đại số sơ đồ khối
Đại số sơ đồ khối
Các phép biến đổi tương đương sơ đồ khối
Chuyển vị trí hai bộ tổng:
26 September 2006 © H. T. Hồng - ÐHBK TPHCM 47
Đại số sơ ... sơ đồ khối
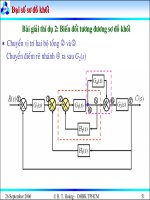
Thí dụ 1
Thí dụ 1
Tính hàm truyền tương đương của hệ thống có sơ đồ khối như sau:
26 September 2006 © H. T. Hồng - ÐHBK TPHCM 42
Đại số sơ đồ khối
Đại số sơ đồ khối
Các...
Bài giảng lý thuyết điều khiển tự động - Mô hình toán học, hệ thống điều khiển liên tục part 6 pps
... các hệ thống phức tạp các
phép tính này hay bị nhầm lẫn.
⇒ Phương pháp biến đổi tương đương sơ đồ khối chỉ thích hợp để
tìm hàm truyền tương đương của các hệ thống đơn giản.
Đối với các hệ thống ...
HHGHGGHG
HGGG
G
E
+++
+
=⇒
Tính toán cụ thể (tt):
26 September 2006 © H. T. Hồng - ÐHBK TPHCM 57
Đại số sơ đồ khối
Đại số sơ đồ khối
Thí dụ 3
Thí dụ 3
Tính hàm truyền t...

Bài giảng lý thuyết điều khiển tự động - Mô hình toán học, hệ thống điều khiển liên tục part 7 pot
... từ một nút nguồn đến một nút đích của hệ
thống tự động biểu diễn bằng sơ đồ dòng tín hiệu được cho bởi:
∑
∆
∆
=
k
kk
PG
1
26 September 2006 © H. T. Hồng - ÐHBK TPHCM 64
Sơ đồ dòng tín hiệu
Sơ ... định thức con:
1
1
=∆
1
2
=∆
13
1 L−=∆
Hàm truyền tương đương của hệ thống:
)(
1
332211
∆+∆+∆
∆
= PPPG
td
272 14254322546 272 14
1 472 1546154321
1
)1(
HGGHGHGGGGHGGGHGGHG
HGGGGGGG...

Bài giảng lý thuyết điều khiển tự động - Mô hình toán học, hệ thống điều khiển liên tục part 8 potx
... © H. T. Hồng - ÐHBK TPHCM 74
Bằng cách sử dụng các biến trạng thái, ta có thể chuyển phương
trình vi phân bậc n mô tả hệ thống thành hệ gồm n phương
trình vi phân bậc nhất, (hệ phương trình ... September 2006 © H. T. Hoàng - ÐHBK TPHCM 72
Phöông trình traïng thaùi
Phöông trình traïng thaùi
26 September 2006 © H. T. Hồng - ÐHBK TPHCM 73
Trạng thái: Trạng thái c...

Bài giảng lý thuyết điều khiển tự động - Mô hình toán học, hệ thống điều khiển liên tục part 9 pps
... September 2006 © H. T. Hồng - ÐHBK TPHCM 82
Cách thành lập PTTT từ PTVP
Cách thành lập PTTT từ PTVP
Thí dụ trường hợp 1
Thí dụ trường hợp 1
Viết PTTT mô tả hệ thống có quan hệ vào ra cho bởi PTVP ... ĐKTĐ, trang 6 7- 6 8
26 September 2006 © H. T. Hồng - ÐHBK TPHCM 87
Cách thành lập PTTT từ PTVP
Cách thành lập PTTT từ PTVP
Thí dụ trường hợp 2 (tt)
Thí dụ trường hợp 2 (tt)
...

Bài giảng lý thuyết điều khiển tự động - Mô hình toán học, hệ thống điều khiển liên tục part 10 ppt
... Φ=Φ
−
L
1
)()(
−
−=Φ
A
I
ss
Trong đó: ma trận quá độ
Thí dụ: xem TD 2.15, Lý thuyết Điều khiển tự động
Đáp ứng của hệ thống?
)()( tt Cx
c
=
Chứng minh: xem Lý thuyết Điều khiển tự động
... thái:
{
)(
1
0
0
)(
)(
)(
)(
001
110
0103
)(
)(
)(
)(
3
2
1
3
2
1
tr
t
tx
tx
tx
t
tx
tx
tx
B
xAx
+
−
−
−
=
...
Từ khóa:
- bài giảng lý thuyết điều khiển tự động mô hình toán học hệ thống điều khiển liên tục part 2 pps
- bài giảng lý thuyết điều khiển tự động mô hình toán học hệ thống điều khiển liên tục part 3 pps
- bài giảng lý thuyết điều khiển tự động thiết kế hệ thống điều khiển liên tục part 6 ppt
- bài giảng lý thuyết điều khiển tuyến tính
- bài giảng lý thuyết điều khiển nâng cao
- bài giảng lý thuyết mạch điện tử
- Nghiên cứu sự biến đổi một số cytokin ở bệnh nhân xơ cứng bì hệ thống
- Báo cáo quy trình mua hàng CT CP Công Nghệ NPV
- Nghiên cứu tổ hợp chất chỉ điểm sinh học vWF, VCAM 1, MCP 1, d dimer trong chẩn đoán và tiên lượng nhồi máu não cấp
- Một số giải pháp nâng cao chất lượng streaming thích ứng video trên nền giao thức HTTP
- Nghiên cứu vật liệu biến hóa (metamaterials) hấp thụ sóng điện tử ở vùng tần số THz
- Giáo án Sinh học 11 bài 13: Thực hành phát hiện diệp lục và carôtenôit
- Giáo án Sinh học 11 bài 13: Thực hành phát hiện diệp lục và carôtenôit
- Giáo án Sinh học 11 bài 13: Thực hành phát hiện diệp lục và carôtenôit
- Giáo án Sinh học 11 bài 13: Thực hành phát hiện diệp lục và carôtenôit
- Phối hợp giữa phòng văn hóa và thông tin với phòng giáo dục và đào tạo trong việc tuyên truyền, giáo dục, vận động xây dựng nông thôn mới huyện thanh thủy, tỉnh phú thọ
- Phát triển mạng lưới kinh doanh nước sạch tại công ty TNHH một thành viên kinh doanh nước sạch quảng ninh
- Nghiên cứu khả năng đo năng lượng điện bằng hệ thu thập dữ liệu 16 kênh DEWE 5000
- Thơ nôm tứ tuyệt trào phúng hồ xuân hương
- Sở hữu ruộng đất và kinh tế nông nghiệp châu ôn (lạng sơn) nửa đầu thế kỷ XIX
- Quản lý nợ xấu tại Agribank chi nhánh huyện Phù Yên, tỉnh Sơn La (Luận văn thạc sĩ)
- BT Tieng anh 6 UNIT 2
- Tăng trưởng tín dụng hộ sản xuất nông nghiệp tại Ngân hàng Nông nghiệp và Phát triển nông thôn Việt Nam chi nhánh tỉnh Bắc Giang (Luận văn thạc sĩ)
- Giáo án Sinh học 11 bài 15: Tiêu hóa ở động vật
- Giáo án Sinh học 11 bài 15: Tiêu hóa ở động vật
- chuong 1 tong quan quan tri rui ro