Bài giảng lý thuyết điều khiển tự động - Mô hình toán học, hệ thống điều khiển liên tục part 2 pdf

Bài giảng lý thuyết điều khiển tự động - Mô hình toán học, hệ thống điều khiển liên tục part 1 doc
... phân
=++++
−
−
−
)(
)()()(
1
1
1
10
tca
dt
tdc
a
dt
tcd
a
dt
tcd
a
nn
n
n
n
n
L
)(
)()()(
1
1
1
10
trb
d
t
tdr
b
d
t
trd
b
d
t
trd
b
mm
m
m
m
m
++++
−
−
−
L
26 September 20 06 © H. T. Hồng - ÐHBK TPHCM 1
LÝ THUYẾT ĐIỀU KHIỂN TỰ ĐỘNG
LÝ THUYẾT ĐIỀU KHIỂN TỰ ĐỘNG
Giảng viên: TS. Huỳnh Thái Hoàng
Bộ môn Điều Khiển Tự Động
Khoa Điện – ... hình toán học
26 September 20 06 © H...

Bài giảng lý thuyết điều khiển tự động - Mô hình toán học, hệ thống điều khiển liên tục part 2 pdf
... lục sách Lý thuyết Điều khiển tự động.
<
≥
==
0 t 0
0 t sin
)().(sin)(
nếu
nếut
tuttf
ω
ω
f(t)
t
0
{}
22
)()(sin
ω
ω
ω
+
=
s
tutL
26 September 20 06 © H. T. Hồng - ÐHBK TPHCM 20
Hàm truyền ... pha:
C
R
1
R
2
1
1
)(
+
+
=
Ts
Ts
KsG
C
α
1
21
2
<
+
=
RR
R
α
Mạch sớm pha:
C
R
1
R
2
1
1
)(
+
+
=
Ts
Ts
KsG
C
α
21
2
RR
R
K
C
+
=
21
12
RR
CRR
T
+
=
1...

Bài giảng lý thuyết điều khiển tự động - Mô hình toán học, hệ thống điều khiển liên tục part 3 pps
... điện từ của động cơ
hằng số thời gian điện cơ của động cơ
26 September 20 06 © H. T. Hồng - ÐHBK TPHCM 22
Hàm truyền của các bộ điều khiển (khâu hiệu chỉnh)
Hàm truyền của các bộ điều khiển (khâu ... Derivative)
sKKsG
DP
+
=
)(
1
2
R
R
K
P
−=
CRK
D 2
−
=
21
22 11
CR
CRCR
K
P
+
−=
sK
s
K
KsG
D
I
P
++=)(
21
1
CR
K
I
−=
12
CRK
D
−
=
26 September 20 06 © H. T. Hồn...

Bài giảng lý thuyết điều khiển tự động - Mô hình toán học, hệ thống điều khiển liên tục part 4 docx
... Hồng - ÐHBK TPHCM 33
Hàm truyền của hệ thống tự động
Hàm truyền của hệ thống tự động
26 September 20 06 © H. T. Hồng - ÐHBK TPHCM 34
Đại số sơ đồ khối
Đại số sơ đồ khối
Sơ đồ khối của một hệ thống ... là:
01.0)(
=
=
ht
KsH
26 September 20 06 © H. T. Hồng - ÐHBK TPHCM 36
Đại số sơ đồ khối
Đại số sơ đồ khối
Hàm truyền của các hệ thống đơn giản (tt)
H...

Bài giảng lý thuyết điều khiển tự động - Mô hình toán học, hệ thống điều khiển liên tục part 5 potx
... ,
G
C
(s)= vòng hồi tiếp[G
2
(s),G
A
(s)]:
)(1)(
1
sGsG
B
+=
)]()().[(1
)(
)().(1
)(
)(
4 32
2
2
2
sGsGsG
sG
sGsG
sG
sG
A
C
−+
=
+
=
Hàm truyền tương đương của hệ thống:
)().()( sGsGsG
CBtd
=
)]()().[(1
)()].(1[
)(
4 32
21
sGsGsG
sGsG
sG
td
−+
+
=
... khối
Thí dụ 1
Thí dụ 1
Tính hàm truyền tương đương của hệ thống có sơ đồ khối như sau:
26 September 20 06 © H. T. Hồng...
Bài giảng lý thuyết điều khiển tự động - Mô hình toán học, hệ thống điều khiển liên tục part 6 pps
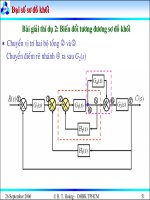
... 2: Biến đổi tương đương sơ đồ khối
Tính toán cụ thể:
2
1
*
G
H
G
A
=
22
2
1
*
HG
G
G
B
+
=
2
12
2
1
11 *
G
HG
G
H
GG
AC
+
=+=+=
22
13 32
3
2
12
22
2
3
11
*
HG
HGGG
G
G
HG
HG
G
GGGG
CBD
+
+
=
+
+
==
26 ... đổi tương đương sơ đồ khối
3133 322 2
13 32
1
3133 322 2
13 32
1
1
1
1
.1
1
.
1
*
HHGHGGHG
HGGG
G
HHGHGGHG
HGGG
G
GG
GG
G
E
E
td
++...

Bài giảng lý thuyết điều khiển tự động - Mô hình toán học, hệ thống điều khiển liên tục part 7 pot
... LLLLLL
+
+
+
+
−=∆
Các định thức con:
1
1
=∆
1
2
=∆
13
1 L−=∆
Hàm truyền tương đương của hệ thống:
)(
1
3 322 11
∆+∆+∆
∆
= PPPG
td
27 21 425 4 322 54 627 214
14 721 546154 321
1
)1(
HGGHGHGGGGHGGGHGGHG
HGGGGGGGGGGGGG
G
td
+++++
+
+
+
=
... đương của hệ thống có sơ đồ dòng tín hiệu
như sau:
Giải:
Đường tiến: Vòng kín:
54 321 1
GGGGGP =
546 12
GGGGP =
721 3
GGGP =
14...

Bài giảng lý thuyết điều khiển tự động - Mô hình toán học, hệ thống điều khiển liên tục part 8 potx
... thái
=
+
=
)()(
)()()(
ttc
trtt
Cx
B
A
x
x
&
=
nnnn
n
n
aaa
aaa
aaa
K
MMM
K
K
21
22 221
1 121 1
A
=
n
b
b
b
M
2
1
B
[
]
n
ccc K
21
=
C
26 September 20 06 © H. T. Hồng - ÐHBK TPHCM 78
Vài thí dụ về phương trình ... truyền tương đương của hệ thống:
)(
1
22 11
∆+∆
∆
= PPG
td
54154 525 14154 321
)()(1 LLLLLLLLLLLLLLLL
−...

Bài giảng lý thuyết điều khiển tự động - Mô hình toán học, hệ thống điều khiển liên tục part 9 pps
... dụ trường hợp 2 (tt)
Thí dụ trường hợp 2 (tt)
Các hệ số của vector B xác định như sau:
−=
×−×−
=
−−
=
=
×−
=
−
=
===
15
2
0610 520
5
2
0510
0
2
0
0
122 12
3
0
111
2
0
0
1
a
aab
a
ab
a
b
ββ
β
β
β
β
−
=
15
5
0
B
⇒
26 ... sau:
0
1 122 111
0
122 12
3
0
111
2
0
0
1
a
aaab
a
aab
a
ab
a
b
nnnn
n
βββ
β
ββ
β
β
β
β
−−−−
−−−−
=
−−
=
−
=
=
K
M...

Bài giảng lý thuyết điều khiển tự động - Mô hình toán học, hệ thống điều khiển liên tục part 10 ppt
... Φ=Φ
−
L
1
)()(
−
−=Φ
A
I
ss
Trong đó: ma trận quá độ
Thí dụ: xem TD 2. 15, Lý thuyết Điều khiển tự động
Đáp ứng của hệ thống?
)()( tt Cx
c
=
Chứng minh: xem Lý thuyết Điều khiển tự động
... (tt)
()
+
=
=
32
1
32
10
10
01
s
s
ss
AI
()
+
+
=
+
=
s
s
ss
s
s
s
2
13
)1. (2) 3(
1
32
1
1
1
AI
()
[] []
13
23
1
2
13
01
23...
Từ khóa:
- bài giảng lý thuyết điều khiển tự động mô hình toán học hệ thống điều khiển liên tục part 2 pps
- bài giảng lý thuyết điều khiển tự động mô hình toán học hệ thống điều khiển liên tục part 3 pps
- bài giảng lý thuyết điều khiển tự động thiết kế hệ thống điều khiển liên tục part 6 ppt
- bài giảng lý thuyết điều khiển tuyến tính
- bài giảng lý thuyết điều khiển nâng cao
- bài giảng lý thuyết mạch điện tử
- Nghiên cứu tổ hợp chất chỉ điểm sinh học vWF, VCAM 1, MCP 1, d dimer trong chẩn đoán và tiên lượng nhồi máu não cấp
- Biện pháp quản lý hoạt động dạy hát xoan trong trường trung học cơ sở huyện lâm thao, phú thọ
- Giáo án Sinh học 11 bài 13: Thực hành phát hiện diệp lục và carôtenôit
- Giáo án Sinh học 11 bài 13: Thực hành phát hiện diệp lục và carôtenôit
- Giáo án Sinh học 11 bài 13: Thực hành phát hiện diệp lục và carôtenôit
- Phối hợp giữa phòng văn hóa và thông tin với phòng giáo dục và đào tạo trong việc tuyên truyền, giáo dục, vận động xây dựng nông thôn mới huyện thanh thủy, tỉnh phú thọ
- Trả hồ sơ điều tra bổ sung đối với các tội xâm phạm sở hữu có tính chất chiếm đoạt theo pháp luật Tố tụng hình sự Việt Nam từ thực tiễn thành phố Hồ Chí Minh (Luận văn thạc sĩ)
- Phát triển du lịch bền vững trên cơ sở bảo vệ môi trường tự nhiên vịnh hạ long
- Nghiên cứu, xây dựng phần mềm smartscan và ứng dụng trong bảo vệ mạng máy tính chuyên dùng
- Tìm hiểu công cụ đánh giá hệ thống đảm bảo an toàn hệ thống thông tin
- Thơ nôm tứ tuyệt trào phúng hồ xuân hương
- Thiết kế và chế tạo mô hình biến tần (inverter) cho máy điều hòa không khí
- Tổ chức và hoạt động của Phòng Tư pháp từ thực tiễn tỉnh Phú Thọ (Luận văn thạc sĩ)
- Kiểm sát việc giải quyết tố giác, tin báo về tội phạm và kiến nghị khởi tố theo pháp luật tố tụng hình sự Việt Nam từ thực tiễn tỉnh Bình Định (Luận văn thạc sĩ)
- Quản lý nợ xấu tại Agribank chi nhánh huyện Phù Yên, tỉnh Sơn La (Luận văn thạc sĩ)
- BT Tieng anh 6 UNIT 2
- Tranh tụng tại phiên tòa hình sự sơ thẩm theo pháp luật tố tụng hình sự Việt Nam từ thực tiễn xét xử của các Tòa án quân sự Quân khu (Luận văn thạc sĩ)
- Giáo án Sinh học 11 bài 15: Tiêu hóa ở động vật
- chuong 1 tong quan quan tri rui ro
- Giáo án Sinh học 11 bài 14: Thực hành phát hiện hô hấp ở thực vật