tinh tian thiet ke che tao bo gay rung sang

Nghiên cứu thiết kế, chế tạo bộ gây rung sử dụng trong thiết bị mỏ
Ngày tải lên :
17/11/2012, 11:19
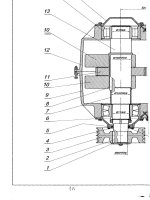
... kích thớc gây rung đa dạng Trong tập hợp đa dạng kiểu gây rung, gây rung sàng tự cân ( ) đợc chọn làm đối tợng nghiên cứu thiết kế, chế tạo Nguyên mẫu dùng làm đối tợng nghiên cứu gây rung cho sàng ... vật liệu mặt sàng 22 3.3 Tính gây rung 24 3.4 Thiết kế gây rung 30 3.5 Công nghệ chế tạo gây rung 30 Chơng Thử nghiệm gây rung 50 Chơng Kết luận kiến nghị ... Kỹ thuật rung đợc ứng dụng nhiều lĩnh vực sản xuất đời sống khác nhau, thiết bị gây rung gồm nhiều chủng loại đa dạng kích thớc Các nguồn tạo xung kích thích rung cho thiết bị (bộ gây rung) đợc...
- 100
- 1.3K
- 3



Báo cáo: Nghiên cứu thiết kế, chế tạo bộ gây sử dụng trong thiết bị mỏ ppt
Ngày tải lên :
27/06/2014, 08:20
... kích thớc gây rung đa dạng Trong tập hợp đa dạng kiểu gây rung, gây rung sàng tự cân ( ) đợc chọn làm đối tợng nghiên cứu thiết kế, chế tạo Nguyên mẫu dùng làm đối tợng nghiên cứu gây rung cho sàng ... vật liệu mặt sàng 22 3.3 Tính gây rung 24 3.4 Thiết kế gây rung 30 3.5 Công nghệ chế tạo gây rung 30 Chơng Thử nghiệm gây rung 50 Chơng Kết luận kiến nghị ... Kỹ thuật rung đợc ứng dụng nhiều lĩnh vực sản xuất đời sống khác nhau, thiết bị gây rung gồm nhiều chủng loại đa dạng kích thớc Các nguồn tạo xung kích thích rung cho thiết bị (bộ gây rung) đợc...
- 100
- 590
- 0

Tính toán thiết kế chế tạo bộ bảo vệ xe máy
Ngày tải lên :
06/06/2016, 16:48
... 0, có tín hiệu chân lên 1.3 ảm biến rung Hình ảnh cảm biến rung thị trƣờng Hình 1.7 Module cảm biến rung Thông số kỹ thuật cảm biến rung: - Sử dụng cảm biến rung SW-420 với tiếp điểm thƣờng đóng ... Lỗ bắt vít cố định - Kích thƣớc board PCB: 3.2cm x 1.4cm - Sử dụng IC LM393 Mô tả hoạt động - Khi không bị rung, đầu mức tích cực thấp, đèn báo xanh - Khi bị rung, đầu tích cực cao, đèn tắt - ... { if( Start==1) Mo=1; 28 { if (Rung= =1) MR=1; { if(MR==1&&Mo==1) { Coi=Pha=1; } } } if(Stop==1) { MR=Mo=0; Coi=Pha=0; } } } 29 2.5 đồ mạch boar Hình 2.2 Sơ đồ mạch boar 30 ƢƠ 3: Ổ Sau thời gian...
- 32
- 327
- 0



Nghiên cứu, thiết kế, chế tạo bộ điều khiển dừng vị trí chính xác của xy lanh khí hành trình đến 2000mm trong trường hợp tải quán tính lớn
Ngày tải lên :
15/05/2014, 21:08
... Hệ bao gồm xylanh khí đợc nối với xe Khi pittông dịch chuyển xylanh làm cho xe dịch chuyển sang trái sang phải *Ưu điểm: - Kết cấu đơn giản, dễ chế tạo - Di chuyển êm, trơn khí *Nhợc điểm: - Khó ... dòng khí chuyển từ 1P sang 2A, khí đợc cấp vào khoang bên phải xylanh làm cho áp suất khoang bên phải xylanh tăng lên Van cha có điện, khí khoang bên trái đợc nối từ cửa 2A sang 3R van van Cuộn ... truyền bánh bị dơ làm cho xe đỗ dừng bị sai vị trí - Bộ truyền bánh di chuyển tốc độ cao bị kêu rung nhiều 1.3 Sơ đồ dẫn động cấu di chuyển ngang xylanh khí nén a Sơ đồ dẫn động xylanh khí Hình...
- 39
- 694
- 0

Nghiên cứu thiết kế, chế tạo bộ điều khiển giám sát tự động để tối ưu năng suất và cỡ hạt máy nghiền bột đá siêu mịn cỡ micromet trên cơ sở công nghệ điều khiển lập trình với sự trợ giúp của máy tính
Ngày tải lên :
19/05/2014, 20:30
... nghiền rung : Máy nghiền siêu mịn phương pháp rung sáng chế từ năm 50 kỷ 20 Nguyên lý hoạt động gần giống máy nghiền bi Năng lượng nghiền chuyển đến vật liệu nghiền thông qua hệ thống bi nghiền rung ... thống điều khiển Y1100 Hệ thống sử dụng Bộ điều khiển trung tâm PLC S7-300 06 mô đun mở rộng Hệ thống điều khiển tập trung, điều khiển trung tâm điều khiển toàn hệ thống cấp liệu, hệ thống nghiền, ... nhiều (ví dụ: mặn từ biển) + Độ rung lớn: kết cấu khí không hoàn toàn vững + Điện cấp không ổn định + Nhiễu lớn: nhiều thiết bị sử dụng nơi, thiết bị gây nhiễu rung, nhiễu điện cao 2.2 Đặc điểm...
- 87
- 787
- 1

Nghiên cứu thiết kế chế tạo bộ giao tiếp giữa máy tính và ecu điều khiển động cơ Mục tiêu của chủ đề này là thiết kế, chế tạo bộ giao tiếp giữa máy tính và ECU điều khiển động cơ và giao diện giao tiếp bằng phần mềm Matlab. pdf
Ngày tải lên :
10/08/2014, 03:20
... đến ECU thông qua vi điều khiển Do đó, để ECU nhận xử lý tín hiệu này, ta phải chuyển tín hiệu số sang tín hiệu tương tự IC chuyển đổi DAC M62358 Ngoài ra, mạch sử dụng IC khuếch đại tín hiệu điều ... Ngô Diên Tập, Lập trình kết nối máy tính Windows, Nxb Khoa học Kỹ thuật, năm 2005 [7] Allan W.M Bonnick, Automotive computer cotrolled systems, Butterworth – Heinemann, 1999 [8] Toyota, Toyota...
- 10
- 624
- 2

Thiết kế chế tạo bộ điều khiển PID ghép nối giữa máy tính và vi điều khiển PSoC dùng cho động cơ robot di động
Ngày tải lên :
25/03/2015, 11:09
... công nghiệp, robot di động tự quản trị (hay robot thông minh nhân tạo) mối quan tâm đặc biệt hầu hết phòng nghiệm robot giới khả ứng dụng to lớn hiệu Robot di động tự quản trị robot có khả tự ... ứng dụng robot công nghiệp điển hình Nhật Bản Đến cuối năm 1995 có khoảng 387.000 robot công nghiệp sử dụng quốc gia có khoảng 80.000 robot công nghiệp sử dụng Mỹ thời điểm Bên cạnh robot nghiên ... KHIỂN PID ỨNG DỤNG CHO ROBOT DI ĐỘNG 3.1 Thiết kế hệ thống điều khiển động cho robot di động 31 31 3.1.1 Động sử dụng cho robot di động 31 3.1.2 Sơ đồ hệ thống động cho robot di động 31 3.1.3 Nguyên...
- 70
- 803
- 0

Thiết kế chế tạo bộ giao tiếp giữa máy tính và mô hình hệ thống đánh lửa điện tử bằng ECU
Ngày tải lên :
20/04/2015, 13:48
... tiếp xúc với tiếp điểm tương ứng với bougie mô hình Như vậy, chia điện phân phối điện cao từ cuộn thứ cấp bobine đến bougie theo thứ tự nổ động
30 2.1.5 Bougie Bougie bao gồm có chức đốt cháy hỗn ... nén, khe hở bougie nhiệt độ điện cực trung tâm bougie Áp suất xi lanh cao 31 khó đánh lửa Vì vậy, động có tỉ số nén cao đòi hỏi phải sử dụng hệ thống đánh lửa có hiệu điện thứ cấp bobine cao 2.1.6 ... cực bougie Do tia lửa xuất trước hiệu điện thứ cấp đạt giá trị cực đại U2m nên lượng tia lửa điện dung phần nhỏ lượng phóng qua bougie Phần lượng lại hình thành tia lửa điện cảm Dòng qua bougie...
- 82
- 688
- 4


Nghiên cứu, thiết kế, chế tạo bộ điều khiển thiết bị từ xa bằng điện thoại di động, module sim 900, AVR và máy tính
Ngày tải lên :
10/05/2015, 12:45
... phần công nghệ mạng GSM AUC (): Trung tâm nhận thức ULR (): Bộ ghi định vị tạm trú HLR (): Bộ ghi định vị thường trú EIR (): Bộ ghi nhận dạng thiết bị MSC (): Trung tâm chuyển mạch dịch vụ mạng ... (dùng cho ký tự mã latin chữ Trung Quốc…) SMS dạng text hỗ trợ nhiều ngôn ngữ khác Nó hoạt động tốt với nhiều ngôn ngữ mà có hỗ trợ mã Unicode, bao gồm Arabic, Trung Quốc, Nhật Bản, Hàn Quốc… ... thị liệu kết nối với trung tâm tin nhắn SMSC Instructions to handset: Chỉ thị liệu kết nối bắt tay Instructions to SIM (optional): Chỉ thị liệu kết nối, nhận biết SIM Message body: Nội dung tin...
- 61
- 1.8K
- 9

Thiết kế, chế tạo bộ điều khiển tuyến tính toàn phƣơng Gaussian sử dụng khuếch đại thuật toán cho hệ thống điều khiển chuyển động
Ngày tải lên :
06/08/2015, 15:55
... biến thiên phức tạp Công ty Megachem Công ty Megachem công ty chuyên sản xuất thiết bị dành học tập Đặc biệt chuyên mô hình lĩnh vực điều khiền hệ thống Công ty Megachem có nhiều sản phẩm nhƣ: mô ... thuộc loại „webcam on board‟, tức camera gắn trực tiếp bo mạch điều khiển HVTH: Phạm Huy Cường – Lớp CH-TĐH-K15 Luận văn tốt nghiệp 10 Chuyên ngành KTĐK TĐH Hình 1.7 : Wedcam on board ĐHKT Australia ... khiển băng tải, … Tháng 11 năm 2005, công ty Megachem giới thiệu mô hình hệ thống „ball and beam‟ Mô hình có „beam‟ dài tới 1m động gắn trực tiếp trung tâm „beam‟ Phƣơng pháp xác định vị trí bóng...
- 73
- 475
- 0

tính toán, thiết kế, chế tạo thử bộ phận tích hợp máy khởi động và máy phát cho động cơ 100cc
Ngày tải lên :
27/11/2015, 10:29
... CHỌN ĐỀ TÀI, MỤC TIÊU VÀ Ý NGHĨA CỦA ĐỀ TÀI 1.1 Lý chọn đề tài Bước sang kỷ nguyên mới, tiến khoa học kỹ thuật nhân loại bước sang tầm cao mới, nhiều thành tựu khoa học kỹ thuật, phát minh, sáng ... điểm rung, gồm ba rơ le: rơle ngăn dòng điện ngược, rơle điều chỉnh điện áp rơle hạn chế cường độ Bộ tiết chế dảm nhận nhiệm vụ: ổn định điện áp phát máy phát điện, ngăn dòng điện ngược từ accu sang ... 114 2.3.2 Tính toán trình nén Tỷ mol nhiệt đẳng tích trung bình không khí: mc v 19,806 0,00209 T ( KJ / Kmol K ) Tỷ mol nhiệt đẳng tích trung bình sản phẩm cháy: GVHD: Trần Thanh Tâm 17 SVTH:...
- 64
- 480
- 0

Thiết kế chế tạo bộ điều khiển PID ghép nối giữa máy tính và vi điều khiển PSoC dùng cho động cơ robot di động
Ngày tải lên :
16/11/2016, 10:55
... công nghiệp, robot di động tự quản trị (hay robot thông minh nhân tạo) mối quan tâm đặc biệt hầu hết phòng nghiệm robot giới khả ứng dụng to lớn hiệu Robot di động tự quản trị robot có khả tự ... ứng dụng robot công nghiệp điển hình Nhật Bản Đến cuối năm 1995 có khoảng 387.000 robot công nghiệp sử dụng quốc gia có khoảng 80.000 robot công nghiệp sử dụng Mỹ thời điểm Bên cạnh robot nghiên ... KHIỂN PID ỨNG DỤNG CHO ROBOT DI ĐỘNG 3.1 Thiết kế hệ thống điều khiển động cho robot di động 31 31 3.1.1 Động sử dụng cho robot di động 31 3.1.2 Sơ đồ hệ thống động cho robot di động 31 3.1.3 Nguyên...
- 12
- 400
- 0

Thiết kế chế tạo bộ điều khiển PID ghép nối giữa máy tính và vi điều khiển PSoC dùng cho động cơ robot di động
Ngày tải lên :
08/02/2017, 21:44
... NăPIDă NGăD NGăCHOă ROBOTăDIă NG 31 3.1 Thi tăk ăh ăth ngăđi uăkhi năđ ngăc ăchoărobotădiăđ ng 31 3.1.1 ngăc ăs ăd ngăchoărobotădiăđ ng 31 3.1.2 S ăđ ăh ăth ngăđ ngăc ăchoărobotădiăđ ng 31 3.1.3 ... tri nă ngăd ngărobotăcôngănghi păđi năhìnhălàăNh tăB n.ă năcu iăn mă1995ăcóă kho ngă 387.000ă robotă côngă nghi p đ căs ă d ngă t iă qu că giaă nàyă vàă cóă kho ngă 80.000ărobotăcôngănghi păđ ... ăcùngăth iăđi măđó.ă Bênă c nhă cácă robotă đ că nghiênă c uă vàă ch ă t oă đ ă ngă d ngă trongă côngă nghi p,ăcácărobotădiăđ ngăt ăqu nătr ă(hayălàărobotăthôngăminhănhânăt o)ăhi năc ngă đangălàăm...
- 12
- 192
- 0

ỨNG DỤNG VI ĐIỀU KHIỂN ATMEGA 16 THIẾT KẾ CHẾ TẠO BỘ ĐIỀU KHIỂN.doc
Ngày tải lên :
19/09/2012, 15:30
... th l cú th tớnh toỏn thit k c mỏy bin ỏp lc b Mch iu khin: Ly vi iu khin ATMEGA 16 lm trung tõm, b iu khin trung tõm cú nhim v nhn cỏc tớn hiu t v phn hi, x lý (thc hin lut iu khin) ri a lnh iu ... - Dng khn cp * Chc nng kim tra giỏm sỏt v bo v: - Hin th cỏc tham s nh: tc , dũng in, in ỏp - Tớn hiu bỏo trng thỏi ang hot ng ca ng c - Cỏc tớn hiu bo v ng c: quỏ dũng, quỏ ỏp, quỏ ti * giao ... in v in ỏp phn ng nh (2,2A-52V), tỏc gi cú sn thyristor 80A600V nờn cú th b qua cụng on lm mỏt v bo v (Nhng nu c gi cha cú sn thỡ phi tớnh toỏn theo phng phỏp thụng thng) Gi s vi ng c nh v in ỏp...
- 7
- 2K
- 32
Tìm thêm:
- hệ việt nam nhật bản và sức hấp dẫn của tiếng nhật tại việt nam
- xác định các mục tiêu của chương trình
- xác định các nguyên tắc biên soạn
- khảo sát các chuẩn giảng dạy tiếng nhật từ góc độ lí thuyết và thực tiễn
- khảo sát chương trình đào tạo của các đơn vị đào tạo tại nhật bản
- khảo sát chương trình đào tạo gắn với các giáo trình cụ thể
- xác định thời lượng học về mặt lí thuyết và thực tế
- tiến hành xây dựng chương trình đào tạo dành cho đối tượng không chuyên ngữ tại việt nam
- điều tra đối với đối tượng giảng viên và đối tượng quản lí
- điều tra với đối tượng sinh viên học tiếng nhật không chuyên ngữ1
- khảo sát thực tế giảng dạy tiếng nhật không chuyên ngữ tại việt nam
- khảo sát các chương trình đào tạo theo những bộ giáo trình tiêu biểu
- nội dung cụ thể cho từng kĩ năng ở từng cấp độ
- xác định mức độ đáp ứng về văn hoá và chuyên môn trong ct
- phát huy những thành tựu công nghệ mới nhất được áp dụng vào công tác dạy và học ngoại ngữ
- mở máy động cơ lồng sóc
- mở máy động cơ rôto dây quấn
- các đặc tính của động cơ điện không đồng bộ
- hệ số công suất cosp fi p2
- đặc tuyến hiệu suất h fi p2