góc b1 â1 1350 góc b3 â3 1350 góc b4 â4 450

PHÂN LOẠI DẠNG BÀI TẬP MÔN CÔNG NGHỆ PHẦN MỀM
Ngày tải lên :
08/11/2013, 15:15
... CNT 45ĐH GROUP Cho ma trận vuông cấp n, n lẻ Đặc tả hình thức điều kiện sau: a, Phần tử góc bên trái phần tử góc bên phải b, Phần tử tâm trung bình cộng phần tử đầu đường chéo phụ Giải: Đặc tả ma ... trận vuông cấp n lẻ : X = (xi j)n*n xi j = x[ i, j ] i, j =1 n n = 2k + k N a, Phần tử góc bên trái phần tử góc dới bên phải x[ 1, ] = x[n, n] b, Phần tử trung tâm trung bình cộng phần tử đờng...
- 7
- 2.3K
- 23





bài tập robot công nghiệp
Ngày tải lên :
14/11/2015, 21:48
... Chú ý : từ phép quay tổng quát suy phép quay quanh trục tọa độ Ví dụ quay quanh x góc ϕ Thay giá trị tương ứng vào (3.15) để kết phép quay : rx = ; ry = ; rz = ; Vϕ = - Cosϕ Rot(x,...
- 2
- 492
- 6

bài tập robot công nghiệp
Ngày tải lên :
14/11/2015, 21:48
... Cho tay máy dạng RP gồm khâu chuyển động quay tịnh tiến tương (hình vẽ) Khâu khâu di trượt vuông góc với Hãy xác định phương trình chuyển động điểm E thông số θ, d theo tọa độ X, Y Y L T10 rE0 ... máy (hình vẽ) bình phương vế (4.2a) ta được: X E2 + YE2 = L2 + d Vậy ta : X E2 d = + • Xác định góc θi : YE2 − L2 (*) L cos θ − X E d Y − d cos θ sin θ = E L ⇒ cos θ = X E + d sin θ L Y − L sin...
- 13
- 782
- 18
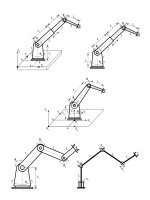

Bài tập robot công nghiệp
Ngày tải lên :
11/04/2016, 16:43
... hệ tọa độ OXYZ cố định hình Quay khối lập phương quanh trục OZ góc 450 sau quay tiếp quanh véc-tơ AB (là cạnh khối lập phương) góc -900 Xác định véc-tơ biểu diễn vị trí điểm C (một đỉnh khối ... quanh trục Z hệ {A} góc θ, sau quay xung quanh trục X hệ {A} góc φ Hãy xác định ma trận quay thể phép quay theo thứ tự cho Bài 14: Một vectơ Ap quay xung quanh trục Z hệ {A} góc 300, sau quay xung ... trục X hệ {A} góc 450 Hãy xác định ma trận quay thể phép quay theo thứ tự cho Bài 15: Cho hệ tọa độ {B} ban đầu trùng với hệ tọa độ {R} Sau quay hệ tọa độ {B} xung quanh trục Z góc θ, quay hệ...
- 20
- 1.4K
- 1










Công ty Cổ phần Đầu tư Công nghệ Giáo dục IDJ TỔNG KẾT CÁC KIẾN THỨC VÀ DẠNG BÀI TẬP VỀ CON LẮC LÒ XO1. Phương trình dao động con lắc lò xo: x = Acos(ωt + ϕ).k 2π m 1 ω 1 = 2π = ; chu kỳ: T = ; tần số: f = = ω k T 2π 2π m 1 1 2. Cơ năng: ppt
Ngày tải lên :
31/03/2014, 11:20
... công thức Và lực đàn hổi tính theo công thức phần - Độ biến dạng lò xo nằm mặt phẳng nghiêng có góc nghiêng α: Δl = mg sin α Δl ⇒ T = 2π g sin α k k k CY chiều dài lò xo: m Trường hợp vật dưới:...
- 3
- 1.1K
- 8
- gốc ghép
- vuông góc
- góc vuông
- tế bào gốc
- góc nhìn
- nguồn gốc
- tế bào gốc
- thẳng góc
- mất hồ sơ gốc bằng lái xe a1
- mất hồ sơ gốc giấy phép lái xe a1
- tích voâ höôùng a1 b1 a2 b2 a3 b3 cos
- bài 36 sgk 94 hình 23 cho biết a b và c cắt a b tại a b hãy điền vào chỗ trống trong các câu sau a lt a1 vì là cặp góc so le trong b lt a2 vì là cặp góc đồng vị c lt b3 lt a4 vì d lt b4 lt a2 vì
- 7 sự phụ thuộc của độ hấp thụ quang vitamin b6 khi không có vitamin b1 a0 và khi có 10 µg ml vitamin b1 a1
- tích vô hướng a1 b1 a2 b2 a3 b3 cos
- câu hỏi 3 trong excel a1 10 a2 15 a3 10 a4 5 a5 10 công thức max sum a2 a1 sum a5 a3 sẽ cho kết quả là
Tìm thêm:
- hệ việt nam nhật bản và sức hấp dẫn của tiếng nhật tại việt nam
- xác định các mục tiêu của chương trình
- xác định các nguyên tắc biên soạn
- khảo sát các chuẩn giảng dạy tiếng nhật từ góc độ lí thuyết và thực tiễn
- khảo sát chương trình đào tạo của các đơn vị đào tạo tại nhật bản
- khảo sát chương trình đào tạo gắn với các giáo trình cụ thể
- xác định thời lượng học về mặt lí thuyết và thực tế
- tiến hành xây dựng chương trình đào tạo dành cho đối tượng không chuyên ngữ tại việt nam
- điều tra đối với đối tượng giảng viên và đối tượng quản lí
- điều tra với đối tượng sinh viên học tiếng nhật không chuyên ngữ1
- khảo sát thực tế giảng dạy tiếng nhật không chuyên ngữ tại việt nam
- khảo sát các chương trình đào tạo theo những bộ giáo trình tiêu biểu
- nội dung cụ thể cho từng kĩ năng ở từng cấp độ
- xác định mức độ đáp ứng về văn hoá và chuyên môn trong ct
- phát huy những thành tựu công nghệ mới nhất được áp dụng vào công tác dạy và học ngoại ngữ
- mở máy động cơ lồng sóc
- mở máy động cơ rôto dây quấn
- các đặc tính của động cơ điện không đồng bộ
- hệ số công suất cosp fi p2
- đặc tuyến hiệu suất h fi p2