dieu khien tu dong he thong lanh

thiết kế hệ thống điều khiển tự động hệ thống chưng cất hệ acid fomic - acid acetic
Ngày tải lên :
05/12/2012, 12:08
... tượng. Trong hệ thống điều chỉnh theo nhiễu, tín hiệu điều chỉnh đi qua mạch điều
chỉnh nhanh hơn trong hệ thống điều chỉnh theo sai lệch. Tuy nhiên điều chỉnh theo nhiễu
cho phần lớn các đối ... việc điều chỉnh theo nhiễu sẽ kém hiệu quả.
2.1.2.3.Điều chỉnh hỗn hợp:
Để tăng hiệu quả điều chỉnh, người ta sử dụng phối hợp hai nguyên tắc điều chỉnh
theo sai lệch và theo nhiễu
T
ε
Thời ... chỉnh theo chương trình:
Có giá trị chủ đạo của đại lượng điều chỉnh là hàm số theo thời gian biết trước U = f(t). hệ
được lắp đặt thêm bộ định trị chương trình tạo dạng của đại lượng U theo thời...
- 18
- 1.4K
- 12

Bài giảng lý thuyết điều khiển tự động - Hệ thống điều khiển phi tuyến part 1 docx
Ngày tải lên :
08/08/2014, 00:20
... niệm
Định nghóa
Đặc điểm của hệ phi tuyến
Các khâu phi tuyến đơn giản
Mô tả toán học hệ phi tuyến
Các phương pháp khảo sát hệ phi tuyến
Phương pháp tuyến tính hóa
Phương pháp hàm mô ... PHI TUYẾN
HỆ THỐNG ĐIỀU KHIỂN PHI TUYẾN
Chương 8
Chương 8
26 September 2006 © H. T. Hoàng - ÐHBK TPHCM 4
Khaùi nieäm
Khaùi nieäm
26 September 2006 â H. T. Hong - éHBK TPHCM 7
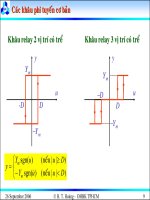
Caực khaõu phi tuyeỏn ... trớ
Khaõu relay 2 vũ trớ
26 September 2006 © H. T. Hồng - ÐHBK TPHCM 8
Các khâu phi tuyến cơ bản
Các khâu phi tuyến cơ bản
<
≥−
=
) nếu0
)nếu
Du
DuuDuK
y
||(
||())sgn((
Khâu khuếch đại...
- 8
- 569
- 1
Bài giảng lý thuyết điều khiển tự động - Hệ thống điều khiển phi tuyến part 2 ppt
Ngày tải lên :
08/08/2014, 00:20
... các hàm phi tuyến
=
=
))(),(()(
))(),(()(
tuthty
tutt
x
xfx
&
26 September 2006 © H. T. Hồng - ÐHBK TPHCM 14
Mô tả hệ phi tuyến dùng phương trình vi phân
Mô tả hệ phi tuyến dùng phương ... phi tuyến dùng phương trình vi phân
Mô tả toán học hệ phi tuyến dùng phương trình vi phân
Quan hệ vào – ra của hệ phi tuyến liên tục có thể biểu diễn dưới
dạng phương trình vi phân phi tuyến ... hàm phi tuyến
=
−
−
)(,
)(
,,
)(
),(,
)(
,,
)()(
1
1
tu
dt
tdu
dt
tud
ty
dt
tdy
dt
tyd
g
dt
tyd
m
m
n
n
n
n
LL
26 September 2006 © H. T. Hồng - ÐHBK TPHCM 12
Mô tả hệ phi tuyến...
- 8
- 370
- 0

Bài giảng lý thuyết điều khiển tự động - Hệ thống điều khiển phi tuyến part 3 pdf
Ngày tải lên :
08/08/2014, 00:20
... dừng của hệ phi tuyến
Điểm dừng của hệ phi tuyến
=
=
))(),(()(
))(),(()(
tuthty
tutt
x
xfx
&
Xét hệ phi tuyến mô tả bởi PTTT phi tuyến:
Nếu là điểm dừng của hệ phi tuyến thì:
),( ... hệ phi tuyến
26 September 2006 © H. T. Hồng - ÐHBK TPHCM 24
Tuyến tính hóa hệ phi tuyến
Tuyến tính hóa hệ phi tuyến
–
–
Thí dụ 1
Thí dụ 1
PTTT:
=
=
))(),(()(
))(),(()(
tuthty
tutt
x
xfx
&
)(9465.0)(3544.0)(
)(2
),(
1
1
tutxtu
A
k
A
tgxaC
u
D
+−=+−=xf
)())(),((
1
txtuth ... ÐHBK TPHCM 19
Phöông phaùp tuyeán tính hoùa
Phöông phaùp tuyeán tính hoùa
26 September 2006 © H. T. Hồng - ÐHBK TPHCM 21
Điểm dừng của hệ phi tuyến
Điểm dừng của hệ phi tuyến
–
–
Thí dụ
Thí dụ
+
+
=
)(2)(
)().(
)(
)(
21
21
2
1
txtx
utxtx
tx
tx
&
&
...
- 8
- 417
- 2

Bài giảng lý thuyết điều khiển tự động - Hệ thống điều khiển phi tuyến part 4 pdf
Ngày tải lên :
08/08/2014, 00:20
... 2006 © H. T. Hồng - ÐHBK TPHCM 27
Tuyến tính hóa hệ phi tuyến
Tuyến tính hóa hệ phi tuyến
–
–
Thí dụ 2
Thí dụ 2
PTTT:
=
=
))(),(()(
))(),(()(
tuthty
tutt
x
xfx
&
Thông số cánh tay ... ,5.0
mgB
mkgJkgM
kgmmlml
==
==
=
=
=
m
u
θ
l
+
+
+
−
+
+
−
=
)(
)(
1
)(
)(
)(cos
)(
)(
)(
),(
2
2
2
1
2
2
tu
mlJ
tx
mlJ
B
tx
mlJ
gMlml
tx
u
C
xf
)())(),((
1
txtuth =x
trong đó:
26 September 2006 © H. T. Hồng - ÐHBK TPHCM 29
Tuyến tính hóa hệ phi tuyến
Tuyến tính hóa hệ phi tuyến
–
–
Thí ...
+=
+=
)(
~
)(
~
)(
~
)(
~
)(
~
)(
~
tutty
tutt
DxC
BxAx
&
=
2221
10
aa
A
=
2
0
b
B
[
]
01
=
C
0
=
D
26 September 2006 © H. T. Hồng - ÐHBK TPHCM 28
Tuyến tính hóa hệ phi tuyến
Tuyến tính hóa hệ phi tuyến...
- 8
- 408
- 1







Nghiên cứu thiết kế chế tạo bộ điều khiển tự động hệ số công suất trong công nghiệp
Ngày tải lên :
24/05/2014, 00:18
... cho phụ tải điện năng” (2009). Tuy nhiên đề tài này theo quan niệm coi dòng điện,
điện áp là sine thuần túy. Quan niệm này không còn phù hợp đối với các phụ tải phi tuyến
ngày càng được ứng dụng ... nhiễu động không cần thiết).
Công thức tính giá trị tụ bù
Dung lượng tụ bù được chọn theo tiêu chuẩn IEC. Theo đó, để chọn tụ bù cho một
tải nào đó ta cần biết công suất P và hệ số công suất ... truyền thông cho phép kết nối với các thiết bị khác theo
chuẩn RS-232 hoặc RS-485 và đóng vai trò như một Slave. Giao thức được sử dụng là
Modbus RTU là một giao thức đơn giản và thông dụng.
3.3...
- 91
- 1K
- 0



NGHIÊN CỨU MÔ PHỎNG HỆ THỐNG ĐIỀU KHIỂN TỰ ĐỘNG CỦA MÁY XÚC
Ngày tải lên :
22/04/2013, 11:14
... chuyển theo phương dọc trục dầm cầu
• Cơ cấu di chuyển trên ray: di chuyển dầm cầu theo phương dọc trục ray
+Rây cáp ,ròng rọc(cơ cấu dể nâng): Cơ cấu nâng dùng để nâng hạ vật nặng theo
phương ... nhà xưởng.
+phía trên dầm chữ I là dàn thép 4 đặt trong mặt phẳng ngang của dầm.
+pa lăng điện 3 có thể chạy dọc theo các cánh thép phía dưới của dầm chử I nhờ
cơ cấu ... cứng đảm bảo độ cứng theo cả phương đứng và phương ngang. Trên dầm
cuối lắp các bánh xe di chuyển 3 chạy trên ray đặt dọc theo sàn nhà xưởng trên các
vai cột.Khoảng cách theo phương ngang giưa...
- 42
- 1.1K
- 2

Nghiên cứu, thiết kế hệ thống điều khiển tự động lò điện trở
Ngày tải lên :
23/04/2013, 15:35
... (y) thu được theo quy tắc MIN
và phép hợp (1.10) được thực hiện theo luật max thì R có
tên gọi là luật hợp thành max- MIN
tăng nguyên giảm
y y’
Hình 1.9 Xác định giá trị rõ theo phương pháp ... Nguyên lý cận trái
Giá trị rõ y’được lấy bằng cận trái y của G theo (1.20).
Giá trị rõ y’ theo nguyên lý cận trái sẽ phụ thuộc tuyến tính
vào độ thoả m•n của luật điều khiển quyết định .
?B’ ... Nguyên lý cận phải
Giá trị y’ được lấy bằng cận phải y theo G theo (1.20).
Cũng giống như nguyên lý cận phải, giá trị rõ y’ở đây phụ
thuộc tuyến tính vào đáp ứng vào của luật điều khiển quyết...
- 132
- 1.5K
- 16

Thiết kế hệ thống điều khiển tự động cho dây truyền sản xuất chi tiết đơn lẻ dùng bộ PLC S7-300 của hãng siemens
Ngày tải lên :
23/04/2013, 15:35
... xylanh A đi ra. Sau
đó xylanh B sẽ thực hiện quy trình làm sạch một phía của chi tiết bằng vòi phun
trong khoảng thời gian t
1
. Tiếp theo chi tiết được chuyển sang phía đối diện bằng
xylanh ... xi lanh 1.0 sẽ đi ra kẹp chặt lấy chi tiết
.sau đó xi lanh 2.0 đi xuống để đưa mũi khoan xuống thực hiện quá trình khoan chi
tiết (phôi) .sau khi khoan xong ,xi lanh2 .0 lùi về .sau khi xi lanh ... Các giá trị theo những địa chỉ
này được modul tương tự chuyển tới các cổng ra tương tự. Chương trình ứng dụng
có thể truy cập miền PQ theo từng byte (PQB), từng từ (PQW) hoặc theo từ kép
(PQD).
...
- 50
- 1.7K
- 9

HỆ THỐNG ĐIỀU KHIỂN TỰ ĐỘNG
Ngày tải lên :
24/04/2013, 16:56
... biết và loại bỏ các biến trung gian. Tuyến tính hóa các phương trình vi phân phi tuyến
tương ứng có thể.
Tiếp tục trong các mô hình toán học tuyến tính hoặc tuyến tính hóa các đại lượng vào
và ... đưa vào cửa nhập liệu, nước theo ống 4 vào thiết bị và
đi từ dưới lên. Nước muối bão hòa sẽ theo ống 2 đi ra ngoài, tại cửa số 2 có hệ
thống lọc cặn không cho cặn theo ống 2 di ra ngoài. Tất ... để đo lưu lượng là đo tín hiệu áp suất giữa 2
bên ống venture ( phương pháp đo lưu lượng theo độ giảm áp thay đổi).
Như vậy ống venturi đóng vai trò cảm biến lưu lượng, chuyển tín hiệu lưu...
- 28
- 603
- 2

đồ án hệ thống điều khiển tự động
Ngày tải lên :
27/04/2013, 20:31
... kế hệ thống điều khiển tự động
GVHD:Bùi Trương Vĩ
Theo bảng 7-4 (TKCTM) lấy
ε
σ
= 0,88
ε
τ
= 0,77
Theo bảng 7-8 (TKCTM) tập trung cho rãnh then
k
σ
= 1,63
k
τ
= 1,5
Tỷ số:
85,1
88,0
63,1k
==
σ
σ
ε
95,1
77,0
5,1k
==
τ
τ
ε
... mmN
=
σ
mmd
mm
49,17
50.1,0
26795
3
==⇒
−
Vậy chọn d
m
= 20 mm
Kiểm nghiệm trục theo hệ số an toàn
Hệ số an toàn được tính theo công thức
[ ]
n
nn
nn
n ≥
+
=
22
.
τσ
τσ
n
σ
- hệ số an toàn chỉ xét ... không cần kẹp chặt chi tiết theo phương thẳng đứng, chi cần cố định hai bên
chi tiết, lưỡi cưa thực hiện chuyển động cắt từ trên xuống sẽ tạo nên lực ép kẹp chi
tiết theo phương thẳng đứng. Phương...
- 20
- 1.5K
- 7

NGHIÊN CỨU MÔ PHỎNG HỆ THỐNG ĐIỀU KHIỂN TỰ ĐỘNG CỦA MÁY XÚC
Ngày tải lên :
27/04/2013, 23:48
... định theo các tham số định mức:
41
cd2
W.
cd
od
R
U
F
=
kt
F
u
M
I
e
dt
dI
TF
∆
∆
≈=
.
1
Stđ của cuộn hồi tiếp âm mềm theo dòng
)(1) (
4
IIiF
catu
∆−=
β
St đ của cuộn hồi tiếp cắt nhanh theo ... thống truyền động làm các
mạch hồi tiếp âm theo tốc độ hoặc theo áp
- Vùng công tác là đặc tính AI
d
, vùng này được tạo ra bởi mạch hồi tiếp cắt nhanh
theo dòng phần ứng. Phần diện tích hình chữ ... động của cuộn hồi tiếp âm mềm theo dòng phần ứng.
- F
4
: Sức từ động của cuộn hồi tiếp cắt nhanh theo dòng phần ứng.
- F
6
: Sức từ động của cuộn hồi tiếp âm theo áp.
3.1.4 - Xác định sức từ...
- 47
- 1.1K
- 3
- hệ thống điều khiển tự động
- hệ thống điều khiển tự động tuyến tính
- các hoạt động của các cơ cấu trong hệ thống điều khiển tự động đều xuất phát từ các phương trình chuyển động được xây dựng trên nguyên lý làm việc của hệ
- mô hình hệ thống điều khiển tự động
- thiết kế hệ thống điều khiển tự động
- he thong dieu khien tu dong plc
- he thong dieu khien tu dong don gian
- he thong dieu khien tu dong khi nen
- he thong dieu khien tu dong thang may
Tìm thêm:
- hệ việt nam nhật bản và sức hấp dẫn của tiếng nhật tại việt nam
- xác định các mục tiêu của chương trình
- xác định các nguyên tắc biên soạn
- khảo sát các chuẩn giảng dạy tiếng nhật từ góc độ lí thuyết và thực tiễn
- khảo sát chương trình đào tạo của các đơn vị đào tạo tại nhật bản
- khảo sát chương trình đào tạo gắn với các giáo trình cụ thể
- xác định thời lượng học về mặt lí thuyết và thực tế
- tiến hành xây dựng chương trình đào tạo dành cho đối tượng không chuyên ngữ tại việt nam
- điều tra đối với đối tượng giảng viên và đối tượng quản lí
- điều tra với đối tượng sinh viên học tiếng nhật không chuyên ngữ1
- khảo sát thực tế giảng dạy tiếng nhật không chuyên ngữ tại việt nam
- khảo sát các chương trình đào tạo theo những bộ giáo trình tiêu biểu
- nội dung cụ thể cho từng kĩ năng ở từng cấp độ
- xác định mức độ đáp ứng về văn hoá và chuyên môn trong ct
- phát huy những thành tựu công nghệ mới nhất được áp dụng vào công tác dạy và học ngoại ngữ
- mở máy động cơ lồng sóc
- mở máy động cơ rôto dây quấn
- các đặc tính của động cơ điện không đồng bộ
- hệ số công suất cosp fi p2
- đặc tuyến hiệu suất h fi p2